Department of EEE:
ACETONE (C3H6O) GAS BASED BLOOD GLUCOSE MONITORING
Diabetes is one of the rapidly growing chronic diseases in the world, for which the cost for both diagnosis and monitoring is expensive. The current clinical techniques for monitoring the blood glucose are invasive which involves pricking the finger with needle and piercing the blood. Thus, we implemented embedded controllers to monitor the blood glucose level through non-invasive method.
Department of Mechatronics:
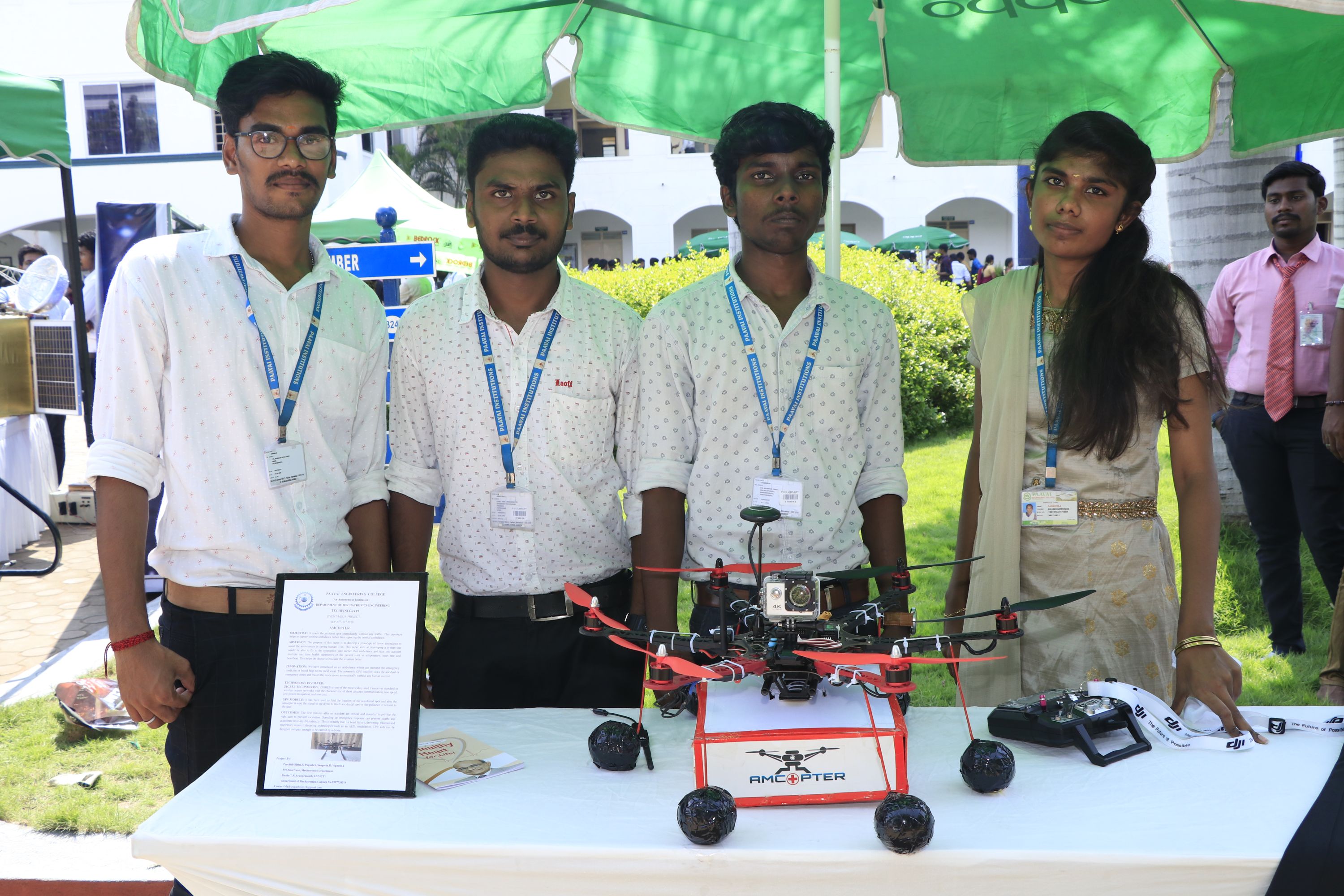
AMCOPTER
A drone or a quad copter takes aerial route and is not driven by human. Using more number of motors and propellers will produce more thrust. Thequad copter which consists of four BLDC motors and propellers attached to it makes it the optimal design and provides the necessary thrust. For 5000mAh batteries provide power supply to the drone. The drone comprises of a med boxwhich is capable of reaching emergency situations faster than the ambulance and can measure patientreal time health parameters. The various sensors in this prototype comprises of heartbeat sensor, temperature sensor, and ECG sensor. An ECG Sensor with disposable electrodes is attached directly to the chest to detect every heartbeat. The electrodes convert heartbeat to electrical signal and thus ECG Sensors are able to measure continuous heart beat and gives data of heart rate. The temperature of the patient’s body is detected by the temperature sensor. The heartbeat or the pulse rate sensor is used to detect the number of heart beats per minute of the patient. The ZIGBEE technology is used to transmit the real time data from the emergency situation spot to the ambulance which is Enroute to the destination. The ZIGBEE mechanism is simpler and less costly than Wi-Fi system.
Department of ECE
DESIGN OF RIVER CLEANING DRONE
Water is a basic need for all living being, it is important to maintain the cleanliness and hygiene of water. Water gets polluted due to many reasons such as waste from industry, garbage waste, sewage waste etc. water from lakes and ponds are cleaned by traditional methods. We have to incorporate technology such that cleaning work is done efficiently and effectively. Mechanisms used for our design is such a way that it collects the waste which floats on water bodies and the collected waste can be easily disposed from the product, our product cleans wastes found such as plastic wastes, garlands, bottles and other wastes found floating on water. Due to increase in water pollution in the form to waste debris; it is hampering the life of aquatic animal and make their life in danger. Similarly sometimes the aquatic animal tends to eats surface waste debris considering it as a food; which ultimately cause the death of animals. Our product is RC controlled using a battery, we have mainly used parts such as frame, waste collector bin and a propeller. Prime objective of our project is to collect all the wastes which are found floating on water bodies and to minimize labor work.
Department of Aeronautical Engineering
SAUCER DRONE MODEL (SOLAR BATTERIES)
A solar drone generally use two pairs of identical fixed pitched propellers; two clockwise (CW) and two counterclockwise (CCW). These use independent variation of the speed of each rotor to achieve control. By changing the speed of each rotor it is possible to specifically generate a desired total thrust; to locate for the centre of thrust both laterally and longitudinally; and to create a desired total torque, or turning force. A solar drone differs from conventional helicopters, which use rotors that are able to vary the pitch of their blades dynamically as they move around the rotor hub. In the early days of flight, solar drone (then referred to either as ‘quadrotors’ or simply as ‘helicopters’) were seen as possible solutions to some of the persistent problems in vertical flight. Torque-induced control issues (as well as efficiency issues originating from the tail rotor, which generates no useful lift) can be eliminated by counter-rotation, and the relatively short blades are much easier to construct. These vehicles were among the first successful heavier-than-air vertical takeoff and landing (VTOL) vehicles However, early prototypes suffered from poor performance, and latter prototypes required too much pilot work load, due to poor stability augmentation and limited control authority.
DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING
FACE DETECTION USING MACHINE LEARNING WITH PYTHON
Face detection is a computer technology being used in a variety of applications that identifies human faces in digital images. Face detection also refers to physiological process by which humans locate and attend to faces in visual scene. The objective of the project is to detect face with the help of machine learning tool and python program. Python is an interpreted high level general purpose language and is used with OpenCV (Open Source Computer Vision) along with a library package for machine learning called as ‘Numpy’. When compared to other machine languages, python is very simple and is an easily executed language. Initially, the face is recorded and stored in the database and accepts the name of the person. Then, it trains the face with the datasets. Later, the face is detected and shows the correct face along with the name of the person. When the face does not match with the input, it shows “NOMATCH”. Therefore, the user will be able to find out the exact match with the help of the features. This technology can be used in common types of surveillance areas including the use of electronics, physical observation, conducting interviews and using technology.